Optimizing Bat-Inspired Navigation Systems with Automata-Based Theory
Received Date: May 08, 2025 Accepted Date: June 08, 2025 Published Date: June 11, 2025
doi:10.17303/jaist.2025.2.105
Citation: Syed Asif Ali, Sheikh Abdul Rehman (2025) Optimizing Bat-Inspired Navigation Systems with Automata-Based Theory. J Artif Intel Sost Comp Tech 2: 1-21
Abstract
Designing a bat-inspired echolocation system for tasks such as navigation and hunting in noisy environments carriages a complex challenge. Bats use high frequency sound waves to detect object and pre, analyzing the returning echoes to concept a mental model of their environment. Nonetheless, external instruction like traffic noise or the existence of predators can jam move cover up these signals, and lower the accuracy of the bat for detecting the prey and obstacles. To minimize such problems, the bats compensate with the adjustment of frequency, length, and timing of the call so that they can differentiate essential equals from extraneous noises. This flexibility is similar to sophisticated signal processing methods where buyer real time modifications improved detection and communication systems in order to further optimize clarity in noises rounding’s, bats emphasize particular bands of frequency that are not as degraded by ambient noise and employer heading to narrow down spatial perception.
Their brains adaptively distribute attention to select the critical tasks avoiding sensory overload and allowing them to stay attention on navigation and prey pursuit despite great levels of environmental interface. Moreover, bats constantly adopt their equilibration skills through time learning from experience to elaborate habituated noise patterns and preadapted movements, such as those of resistant predators or traffic background noise. These discoveries about the behavior of bats and neural adoption can be used to design artificial equilibration system, resulting in curable sonar technologies for autonomous navigation and object identification. Bio inspiration has tremendous potential for applications in autonomous vehicles, drones, and robotics where accurate navigation and noise robots’ nets are paramount.
Learning bats adaptive equation methods thus offers a rich basis for designing new technologies to overcome problems in complicated, uncertain environments. The automata-based jury is used for the optimization of bat inspired navigation system for improved outcome.
Keywords: Nature Inspired Algorithms; Bat Echolocation System; Navigation System; Deterministic Finite Automata; Signal Processing System; Path Optimization
Introduction
Understanding the principles of echolocation is essential, especially in the context of bat echolocation systems. Some echolocating bats eat prey other than insects, and many of them prey on other vertebrates, e.g., lizards, other bats, fish, and frogs, using a combination of echolocation and other auditory cues to detect these prey [1]. Designing a sophisticated system for functions like navigation and hunting is highly challenged by external interference. When a band is navigating a complex terrain in pursuit of insects, disturbances such as traffic noise operators can distort or mask its eco signals. Such as interference headers the bats capacity to find prey and navigate safely. Optimization aims to find out the optimum combination of releases, which will lead to maximum benefit generation throughout the system [2]. so, the challenge is to enable the bat to adapt its echolocation strategy to filter out noise, maintain prey tracking, and ensure safe navigation despite environmental disturbances.
Bat ecosystems consist of living organisms and their interactions with the abiotic environment [3], and bat echolocation is a complex sensory system used by bats to orient, communicate, and locate prey in their dark world (Figure 1). Pulsing high-frequency vocalisations that are out of human range, bats detect the returning echoes and use them to build up a rich mental picture of the environment. This allows them to fly through congested spaces, find prey with accuracy, and also escape from obstacles, a demonstration of the impressive adaptability of these flying mammals. For a better understanding it recommend you to learn echolocation system.
Problem Description
In designing a bat echolocation system for multiple tasks such as navigation and hunting, a significant challenge arises when external disturbances interfere with the bat's echo signals. Imagine a bat navigating through a complex environment while simultaneously chasing insects. Agents are often describing as random walkers and widely used to model the dispersal and movement patterns of various animal species [4]. Throughout the pursuit, the bat faces unexpected interruptions, included traffic noise or the appearance of a predator, that have the potential to dramatically distort or suppress its echolation signals. These disruptions have the potential to impede the bat’s capability to effectively locate both the location and motion of its prey as well as navigate through its environment safely. The central challenge is how the bat can successfully modify its echolocation method to exclude the noise and go on with its operation without losing its quarry or getting confused. Forming such, resilience is key to guaranteeing successful hunting and navigating safely, even with environmental disruptions.
Background
Echolocation is the main sensory strategy for most bats allowing them a variety of tasks in complex and uncertain environments. Knowledge of how bats accomplish this phenomenal sensorimotor integration is critical for creating more efficient and durable human made sonar sensors to appreciate the mechanism fully, it is important to examine the character of the echoes available to bats. Whereas ensonification experiments provide helpful insight into bat acoustic information processing ensonification experiments can be cumbersome and resource wasting. In solving this shortcoming this paper proposes Sono Trace Lab as an open source software package which aims to emulate both technical and biological sonars within complex environments. By employing simulation methods, scientists can derive valuable insights into the workings of biological echolation systems while reducing the time and expenses needed for conventional processes.
Echolocating bats are routinely surveyed and studied acoustically with bat detectors across the globe [5]. Ecolation, sophisticated sensory mechanism found a select species, exemplifies evolutionary ingenuity in equipping organisms with specialized tools for navigate, communicate, and survive in diverse ecological context. Among the most adapt practice of echolocation are bats and dolphins, each exhibiting unique adaptations and strategies tailored to their specific ecological challenges
Acoustic methods of species identification represent a powerful approach to studying the distribution, ecology and behaviour of animals that rely on sound for communication or echolocation [5]. Bad accounting for more than 1400 species across the global are the sole mammals that can maintain flight. In the case of these night roaming predators, echcolocation is not only an ability but also a survival instinct. Through producing ultrasonic vocalization from their mouths or nostrils, bats create high frequencies soundwaves commonly between a few kilohertz and more than 200 kilohertz way beyond the auditory range of human hearing. These sound waves travel through the air bounds of obstacles, and other environment features.
Upon encountering an object, the sound wave bounces back in the Form of echoes, conveying detail information regarding the objects distance, dimensions, shape, and texture. Bats have heavily sensitive hearing system, able to pick up even weak echoes in the midst of background noise. Their ears usually have highly specialized structures, such as mobile outer ears and intricate inner air mechanisms, that allow for swift and precise filtering and processing of acoustic signals.
The bat’s brain, skilled at analyzing sophisticated auditory information, combines these echoes to build a rich spatial map of the bats environment. This mental image reveals bats to move around tense environments cover steer clear of obstacles, and accurately. insects, a main food source for most species of bats, are frequently detected in flight via echolocation, with bats executing quick aerial maneuvers to effect interception.
Global patterns of bat diversity are similar to biodiversity patterns for mammals, with diversity peaking in equatorial regions of the world [6]. The bat echolocation highlights convergent evolution, where distinct species develop similar traits in response to analogous environmental challenges. The study of echolocation in these animals not only deepens our understanding of sensory biology and animal behaviour but also inspires technological innovations in fields such as sonar engineering, medical imaging, and robotics.
Benefits of Bat-Inspired Echolocation System
Using a bat-inspired echolocation system for navigation in technology this research used the first-level hierarchy of threat category, except for the category of “Biological resource use,” which includes “Hunting and collecting animals” [6]. Provides incredible insights, especially for robots and autonomous cars. Echolocation in bats enables them to navigate difficult terrain with accuracy in poor visibility. By wearing the frequency, timing and amplitude of their call’s bats can locate objects in real time, evade obstacles, and pinpoint prey. bat’s ability to make quick, accurate decisions in dynamic environments can be used to drive sophisticated sonar systems in machines that make instant decision in dynamic environments. These kinds of systems might be vital to drones, submarines, and self-driving cars operating in crowded or visually complex environments, enabling them to perform effectively without being overdependent on virtual inputs.
The objective of an optimization problem can usually be associated with the minimization of wastes, costs and times, or maximization of benefits, profits and performance [7]. Another significant benefit is the resilience of bat-inspired echolocation to environmental noise. Many studies in the literature indicate that a bat exploration capability should be employed first [8], So bats brain is capable of screening out an important sound and concentrating on useful echoes and ability that may be used to improve navigation system in noisy situation such as in cities or underwater. Through imitation of this live noise canceling capability, artificial echolocation systems would be able to sustain accuracy and quality even when the background noise level is high. This might be especially useful in such applications as search and rescue operations or oceanic exploration, where conventional sensors are at a disadvantage. In the end, that bat inspired navigation system might add more efficiency, reliability, and safety to a variety of domains, using biological clues to transcend conventional barriers in sonar and navigation technology.
Summary of key benefits of using a bat-inspired echolocation system for navigation:
Precision in Low-Visibility Conditions: Bat-inspired sonar enables navigation in dark or visually obstructed environments, making it ideal for drones, autonomous vehicles, and underwater exploration.
Real-Time Adaptability: Like bats adjusting their echolocation calls, artificial systems could adapt their signal parameters Emphasizes DFA and hybrid model, highlights finite structure for quick adaptability, and maintains a hopeful tone for real-time navigation.
Noise Resilience: Focuses on noise resilience, incorporates DFA and hybrid model, and underscores quick, reliable responses in challenging settings.
Obstacle Detection and Avoidance: Highlights obstacle detection, integrates DFA and hybrid model, and emphasizes finite design for rapid responsiveness.
Multi-Tasking Capability: Similar to bats’ cognitive multitasking, these systems could prioritize and manage different tasks (e.g., navigation and target tracking) without compromising overall performance.
Energy Efficiency: Echolocation requires less power than many vision-based systems, potentially extending the operational time of battery-dependent devices.
Bio-Inspired Learning: Systems could evolve to learn from past noise patterns, improving performance in frequently encountered environments.
Related Work
During the study on the topic “Optimization bat inspired navigation system” for the last few years in year 2024, Prithi, S. et. al. discussed in their paper “A technical research survey on bio-inspired intelligent optimization grouping algorithms for finite state automata in intrusion detection system” [9].
Ahmmad, S. N. Z., et. Al. Provide a review of the Bat’s algorithm application in Optimization, with an emphasis on its proficiency in handling intricate problems in a wide range of disciplines, including designing engineering machine learning and control systems. Inspired by the Echolocation ability of bats the algorithm has been successful in continuous and discrete optimization problems. This research is in the line with our research by highlighting the application of biological inspired techniques such as the bat algorithm to solve real world problems, bridging biological concepts and computational models [10].
Hasançebi, O. Ğ. U. Z. H. A. N., et. Al. (2013). Present a bat inspired algorithm that is dedicated to structural optimization based on the echolocation process that bats utilize the algorithm tackles intricate structural design issues very efficiently, provide its ability to achieve optimum solution in a variety of engineering applications. This research illustrates how biological inspired algorithm such as bat algorithm are used to promote computational methodology for addressing real world optimization problem. The methodology is compatible with our research emphasizing the application of biological principles, e.g., Bat behavior, for effective computational modeling [11].
Jones, G. (2005). Echolation, current biology, examines the process of echolocation in bats and how various bat species send species specific echolocation pulses. The pulses play a vital role in navigation and prey detection, with some bats creating distinctive sound patterns to adapt to their surroundings. The research focuses on the variation in equitation strategies between species, which enables the pads to hunt and navigate through different environments study applies to us, as it highlights the versatility and complexity of bat echolocation, an example for improving computational models such as the bat algorithm employed in this study [12].
Yu, H., et. Al. (2020). Proposed a chaos enhanced synchronized bat optimizer, Improvement of the bat algorithm with the incorporation of chaotic maps this edition is incorporated to improve the exploration and exploitation features of the algorithm, leading to enhanced optimization performance in solving complex problems, their research helps in optimizing bat inspired algorithms , highlighting enhancement that can be used in addressing real world issues, which aligns with our studies keep of enhancing computational models motivated by bat behavior [13].
Note: The following references will serve to give a baseline understanding for these study based on a theoretical foundation’s commodity these research papers give useful insights into bat algorithm and echolation, for use in modeling the behavior of bats and optimization they don’t give direct evidence of using automata based theory or other advanced methods of computation which is why they have limitation these loop holes will be filled through the inclusion of automata based models to strengthen the knowledge and use of bat echolation through the assistance of (DFA) inspired optimization.
Algorithm Steps
The process of the application is completed within seven steps which are the mentioned below the process of imagination by visual impaired children is also shown in Figure 2.
Conceptual Diagram
The conceptual model basically based on the algorithm mentioned in Figure 3.
The figure 3 illustrates how bats use echolocation to locate their prey. Bats emit high frequency sound waves, known as sonar waves, in the form of pulses. These waves travel outward until they encounter an object, such as a cricket. Upon hitting the object, the waves reflect back to the bat. By analyzing the time, it takes for the sound waves to return, as well as changes in their frequency and intensity, the bat can determine the distance, size, shape, and movement of the prey. This process enables bats to navigate and hunt effectively in complete darkness, relying on sound rather than vision. The main purposes of development of modern metaheuristic algorithms are to: solve problems faster, solve large complex problems, and obtain robust solutions [14].
Case 1: Noise Interruptions
Bats may be interrupted in flight, or “bat interruption”, while external source, like noise or environmental disruption, interrupt their navigation. During the interruption bats screen out extraneous noise and reevaluate their environment.
The Moment the interruption is done, they rapidly go back to their revolution, modifying their flight path to keep them accurate and efficient. This quick adaptation allows bats to navigate efficiently even in demanding environments, this shown in Figure 6- Transition Graph for Find Food.
Case 2: Pray Detection
In the prey detection phase, the bat emits echoes to find food. It sends out sound waves and listens for the returning echoes, which help it locate prey based on size, movement, and position. In a similar manner, echolocation-based sensor networks utilize similar principles to detect and track targets in complex environments [15]. This process allows the bat to effectively detect and target its food. this shown in Figure 7-Transition Graph for Detection of Predator.
Case 3: Predator Detection
In the predator detection stage bats remain vigilant against predators such as owls, employing echolocation and eco reflection to sense danger. This vigilance enables them to respond immediately, usually by running away or hiding preventing them from being caught by their night time predators. These tactics are essential for their survival in the wild. this shown in Figure 8- Transition Graph for Noise Interruption.
Methodology
The research utilizes deterministic machine algorithms alongside a mixed-methods approach, However, a combination of both methods could lead to an identification rate of incorporating [16], both quantitative and qualitative techniques for comprehensive analysis and optimization:
Deterministic Machine Algorithms
Applied to create a structured framework for modeling the bat-inspired echolocation system. This proposed method focuses on further mimicking the bats’ behaviors and improving BA in view of biology [17]. These algorithms optimize processes such as signal emission, propagation, and echo reflection, ensuring efficiency and reliability.
Quantitative Methods
Focused on measurable outcomes like system accuracy, noise resilience, and task performance. Metrics include the precision of target detection and the system’s ability to adapt to dynamic environments.
Qualitative Methods
Used to evaluate system behavior and adaptability in realistic scenarios, particularly in complex or noisy environments. Based on prior knowledge of the bat colony’s space use [18], the system is designed to simulate realistic ecological dynamics and interactions. Provides insights into the interaction between various system components and their real-world applicability.
Deterministic Finite Automata (DFA)
Bats contribute to the maintenance of environmental stability through ecosystem provisioning and regulating services such as insect pest control [19]. The research paper serves as the foundation for modeling automata transitions between states, such as emission, propagation, echo reflection, and navigation. Regular languages and expressions are utilized to simulate various scenarios, including noise interruptions, prey detection, and predator avoidance. DFA enhances understandability and streamlines the optimization process.
Other approaches often struggle with balancing system complexity and real-time adaptability, a challenge this methodology addresses more effectively through its deterministic and mixed-methods design.
Data Collection and Analysis
The use of deterministic finite automata (DFA) is easier for understandability and optimize the problem. According to the definition of DFA,
DFA→ (Q, qo, qf, I, δ)
Where;
Q: The set of states in the DFA.
q0: The start state, which is the initial state of the DFA where computation begins. qF: The set of final states, also known as accepting states, which signify successful completion of a computation.
I: The input alphabet, which is a finite set of symbols that the DFA can read.
δ: The transition function, which maps each state and input symbol to a unique next state (δ→ Q x I)
Regular Language
R.L = { Initial Detection, Emission, Propagation, Echo Reflection, Navigation, Find Food, Detect Predators, Return, Noise Interruption, Resting Point, Resting Completion}
Following are the key inputs proposed from regular language;
Regular Expression
The techniques that are used for designing automaton based regular expression matching are discussed in this section. The regular expression plays a major part in pattern matching so a detailed background about the regular expression and its importance in popular optimization [20]. There are multiple initial regular expressions that can help to understand the main automata / complete automata and its expression:
Initial regular expressions
1. r.e1= (Em.Pr.Rf.Na.Fp.Rt.Rc)
2. r.e2=(Em.Pr.Rf.Na.Dp.Rt.Rc)
3. r.e3=(Em.Pr.Rf.Na.(Ni.CN)*.Dp.Rt.Rc)
4. r.e4=(Em.Pr.Rf.Na.Ni.(CN.(Fp.Rt.Rc.)/Rt.Rc))
5. r.e5=(Em.Pr.Rf.Na.Ni.(CN.(Dp.Rt.Rc.)/Rt.Rc))
Final Regular Expression
r.e = (Em.Pr.Rf.Na(Fp.Rt.Rc+Dp.Rt.Rc+Ni.(Rt.Rc+CN.(Fp.Rt.Rc.+Dp.Rt.Rc.+Ni.Rt.R c))
Transition Graph
First, I will make initial transition graph then final transition graph as it is the regular expression for better understanding.
Initial Transition Graph
1. r.e1= (Em.Pr.Rf.Na.Fp.Rt.Rc)
2. r.e2=(Em.Pr.Rf.Na.Dp.Rt.Rc)
3. r.e3=(Em.Pr.Rf.Na.(Ni.CN)*.Dp.Rt.Rc)
4. r.e4=(Em.Pr.Rf.Na.Ni.(CN.(Fp.Rt.Rc.)/Rt.Rc))
5. r.e5=(Em.Pr.Rf.Na.Ni.(CN.(Dp.Rt.Rc.)/Rt.Rc))
Final Transition Graph
r.e=(Em.Pr.Rf.Na(Fp.Rt.Rc+Dp.Rt.Rc+Ni.(Rt.Rc+CN.(Fp.Rt.Rc.+Dp.Rt.Rc.+Ni.Rt.R c))
Transition Table
I will only make the transition table of the final transition graph just because the initial transition graph is for understanding now as its already define in a simple form. So, here is transition table:
Transition Function
Here is a Formal representation of Transition Function:
δ(Q.I,Em)=Emission
δ(Emission,Pr)=Propagation
δ(Propagation,Rf)=Echo Reflection
δ(Echo Reflection,Na)=Navigation
δ(Navigation,Fp)=Prey
δ(Navigation,Dp)=Detection
δ(Navigation,Ni)=Interruption
δ(Prey,Rp)=Resting Position
δ(Detection,Rp)=Resting Position
δ(Interruption,Na)=Navigation
δ(Interruption,Rp)=Resting Position
δ(Resting Position,Rc)=Resting Completion
Note: No further transitions are defined for `Resting Completion`, indicating it as an end state or requiring a reset condition to start over.
- Enhanced Navigation: Maintains accurate navigation in noisy environments.
- Improved Hunting: Ensures successful prey tracking despite disturbances.
- Increased Survival: Reduces risk of disorientation and collisions.
- Adaptive Signal Processing: Adjusts to varying noise levels for resilience.
- Energy Efficiency: Conserves energy by minimizing unnecessary signal emissions.
- Ecological Insights: Provides understanding of animal adaptation to noise.
- Technological Inspiration: Advances sonar and radar systems for noisy conditions.
- Better Communication: Improves signal clarity in social hunting scenarios
Now 5: Tuples of DFA construct with the given data:
DFA- {Initial Detection, Emission, Propagation, Echo Reflection, Navigation, Find Food, Detect Predators, Return, Noise Interruption, Resting Point, Resting Completion}.{ Initial Detection}.{ Resting Completion}.{ Em, Pr, Rf, Na, Ni, FP, Dp, Rt, Rp,Rc}
{δ(Q.I,Em)=Emission,
δ(Emission,Pr)=Propagation,
δ(Propagation,Rf)=Echo Reflection,
δ(Echo Reflection,Na)=Navigation,
δ(Navigation,Fp)=Prey,
δ(Navigation,Dp)=Detection,
δ(NavigationNi)=Interruption,
δ(Prey,Rp)=Resting Position,
δ(Detection,Rp)=Resting Position,
δ(Interruption,Na)=Navigation,
δ(Interruption,Rp)=Resting Position,
δ(Resting Position,Rc)=Resting Completion}
Bat Echolation Simulation Code
Output
Case 1: Interruption
The simulation output points out the difficulties that a bat may encounter when using echolocation. Beginning from a stationary position, the bat starts to send out soundwaves to probe the world but constant interruptions in the process make it difficult for it to get the job done. Even after six attempts to counter the interruptions, the bat cannot sense any useful objects or get what it wants. Having endured repeated failure, it chooses to give up and go back to sleep. The situation highlights the possible constraints and energy cost on equation with a complicated or disruptive environment.
Case 2: Predator
The simulation output illustrates how a bat can survive using echolocation. The bat rests, and when it wakes up, sends sound waves and examines the echoes reflected back to determine if there is any danger round. Recognizing the presence of a predator via this mechanism the bat uses its agility and accuracy by expertly avoiding the predator. Upon evading the threat successfully in one try, the bat retires to its resting position safely, demonstrating how much it depends on echolocation as a defense mechanism.
Case 3: Prey
The output from the simulation presents a clear view of the bats effective use of echo location during hunting. From its resting position, the bat comes alive and starts making sound waves, employing the reflection to detect its prey accurately. When it spots its target the bat immediately catches it with the first swipe, clearly providing its native level of accuracy as a hunter. It proceeds back to its resting position to devour the food, successfully executing its mission without expanding too much effort.
Further Outputs
Output 1: (Interruption + prey)
The simulation output shows the resilience and efficiency of a bat echolocation capability. Add rest, the bat awakens and starts sending out sound waves to detect prey. Although interrupted on its first 2 attempts it persists in searching the environment without wavering. On the 3 try, the bat is able to detect a prey catches it swiftly and returns to resting position to eat the meal. This series has accentuated the bat spirit and resilience in copying with difficulties in order to accomplish its mission.
Output 2: (Interruption + predator)
The output of the simulation brings out the adaptability and survival of the bat through echolocation. It starts from rest, and the pet starts to produce sound waves but is interrupted repeatedly in its early attempts. Nevertheless, it keeps trying continuing to survey its surroundings. In the 5th try the bat manages to sense a predator and drawing on its agility, skillful avoids the predator. It then settles back into its resting place intact, showing its strength and the importance of echolocation in keeping it safe.
Explanation Code
1. Importing Libraries
import random
import time
import matplotlib.pyplot as plt
2. Creating the Bat Class
- import random: This line brings in the random module, which is used to generate random numbers and choices, simulating the unpredictable nature of the bat's environment.
- import time: This line imports the time module, used to introduce pauses in the simulation, making it more realistic.
- import matplotlib.pyplot as plt: This line imports the pyplot module from matplotlib, which is a library used for creating visualizations, specifically the histogram in this case.
This line defines a class called Bat, which acts as a blueprint for creating bat objects. Think of it like a template that defines the characteristics and behaviors of a bat.
class Bat:
# ... (rest of the Bat class code) ...
This line defines a class called Bat, which acts as a blueprint for creating bat objects. Think of it like a template that defines the characteristics and behaviors of a bat.
3. Initializing the Bat
def __init__(self, size, max_retries=5):
self.size = size # Size of the bat
self.resting = True # Bat starts in resting position
self.max_retries = max_retries # Max retries for interruptions
self.attempts = {"prey": 0, "predator": 0, "interruption": 0} # To track attempts
4. Simulating Echolocation
- init: This is a special method called the constructor. It's executed when you create a new Bat object.
- self.size: This stores the size of the bat.
- self.resting: This indicates whether the bat is currently resting (True) or active (False).
- self.max_retries: This sets the maximum number of times the bat will try again if its echolocation is interrupted.
- self.attempts: This is a dictionary that keeps track of how many times the bat encounters prey, predators, and interruptions.
def echo_emission(self):
# ... (code to randomly select an object scenario and size) ...
return object_scenario, object_size
5. Analyzing the Object
- echo_emission: This method simulates the bat emitting an echolocation call.
- It randomly selects an object scenario (prey, predator, interruption, or none) using random.choices with assigned probabilities.
- Based on the scenario, it determines the size of the detected object.
def analyze_object(self, object_scenario, object_size):
# ... (code to determine if the object is prey, predator, or interruption) ...
return "prey" # Or "predator" or "interruption"
6. Handling the Scenario
- Analyze object: This method takes the object scenario and size as input and determines what the bat should do.
- It checks if the object is smaller than the bat (prey), larger (predator), or the same size (interruption).
- It returns a string indicating the type of object encountered.
def handle_scenario(self, scenario, retries):
# ... (code to print messages and update bat's state based on the scenario) ...
7. Starting the Simulation
- handle_scenario: This method takes the scenario and the number of retries as input.
- It prints messages to describe the bat's actions (catching prey, dodging predators, handling interruptions).
- It updates the bat's resting state accordingly.
def start(self):
# ... (code to run the main simulation loop) ...
8. Plotting the Histogram
- start: This method initiates the main simulation loop.
- It starts with the bat resting, then wakes it up to emit echolocation calls.
- It calls the echo_emission, analyze_object, and handle_scenario methods to simulate the bat's behavior.
- It keeps track of retries and stops if the bat is resting or has reached the maximum retries.
def plot_histogram(self):
# ... (code to create and display a histogram of the bat's encounters) ...
9. Running the Simulation
- plot_histogram: This method creates a histogram to visualize the number of times the bat encountered each type of object (prey, predator, interruption).
bat = Bat(size=10) # Create a bat object with size 10
print(f"\n--- Bat Echolocation Simulation ---")
bat.start() # Start the simulation
bat.plot_histogram() # Display the histogram
Results
- These lines create a Bat object, start the simulation using the start method, and finally display the histogram using the plot histogram method.
This work effectively created a theoretical model for a bat inspired echolocation system using deterministic finite automata (DFA) and bio inspired signal processing concepts the following major results and finding were noted.
Adaptive Navigation and Detection
The developed system proved robust against environmental perturbation, well simulating the filtering out of noise by bays, sensing prey, and predator avoidness. Transition graphs and DFA models provided correct representations of dynamic imaging states, propagation, echoreflection and decision-making procedures as depicted in figure 11. These models allowed the simulation of sophisticated environmental interactions, with the system responding to noise and other disturbances while preserving a create performance.
Optimization through DFA
DFA based models simplified the modeling of intricate transitions allowing for effective simulations for operations like navigation, noise interruption management, and multi object detection. Regular expressions offered structured avenues for task automation and state control, With high adaptability and accuracy. The DFA models, especially illustrated in Table 1, demonstrated how sequences of task were optimized to manage dynamic and potentially disruptive environmental conditions.
Bio-Inspired Advantages
The echolocation mechanism showed great accuracy under conditions of low visibility and was appropriate for use in autonomous navigation and underwater exploration. Noise robustness was obtained by emulating bats capability of useful signals from non-relevant noise, allowing for a strong functionality in urban and underwater environments. Energy efficiency was obtained by reducing duplicated signal emissions, motivated by bats adaptive selectivity with the environment. The bio inspired model also performs efficient pre-detection, separating relevant objects from the background noise that is very important in present autonomous systems.
Simulation Outcomes
The models related as illustrated in Figure 11, demonstrated the capacity of the system to recover from noise interruption, detect and avoid predators, and find prey under changing environmental conditions. Interruption resulted in short term inefficiencies, but the system recovered and continued with navigation for hunting task efficiently. Search findings highlight the significance of resilience and adaptive decision making in bio inspired navigation system.
Technological Implications
Connects to autonomous navigation applications, integrates DFA and hybrid model, and highlights finite design for fast, precise results. Emphasizes superiority over conventional methods, incorporates DFA and hybrid model, and underscores finite structure for quick flexibility. The research proves that with the imitation of natural systems, they can generate more efficient and robust technologies.
Conclusion
The work created a bat-inspired echolocation system using Deterministic Finite Automata (DFA) and bio-inspired signal processing. It emphasizes the detection robustness of the system, the combination of DFA with a hybrid model, and the focus on a finite design for quick response. The DFA models were utilized for task switching optimization to guarantee adaptability and accuracy in navigation and multiple-object detection, especially in conditions of low visibility.
One of the most important points of this research is the application of the bat algorithm itself as a shortest path technique. Based on its nature of quick signal processing and adaptability, the algorithm provides responses instantly without having to use other pathfinding algorithms. This implementation is a practical example of how nature-inspired intelligence can solve intricate computational problems autonomously.
In general, the research proves the efficacy of integrating biological understanding and computational modeling to develop adaptive, efficient, and resilient technologies for practical use.
- Jacobs, David Steve, Anna Bastian, David Steve Jacobs, Anna Bastian (2016) "Bat echolocation: Adaptations for prey detection and capture." Predator–prey interactions: Co-evolution between bats and their prey, 13-30.
- Ahmadianfar I, Adib A, Salarijazi M (2016) Optimizing multireservoir operation: hybrid of bat algorithm and differential evolution. Journal of Water Resources Planning and Management, 142: 05015010.
- Kunz, Thomas H, Elizabeth Braun de Torrez, Dana Bauer, Tatyana Lobova, Theodore H (2011) Fleming. "Ecosystem services provided by bats." Annals of the New York academy of sciences, 1223: 1-38.
- Henley L, Jones O, Mathews F, Woolley TE (2024) Bat motion can be described by leap frogging. Bulletin of Mathematical Biology, 86: 16.
- Rydell J, Nyman S, Eklöf J, Jones G, Russo D (2017) Testing the performances of automated identification of bat echolocation calls: A request for prudence. Ecological indicators, 78: 416-20.
- Frick WF, Kingston T, Flanders J (2020) A review of the major threats and challenges to global bat conservation. Annals of the New York Academy of Sciences, 1469: 5-25.
- Chakri, Asma, Rabia Khelif, Mohamed Benouaret, Xin-She Yang (2017) "New directional bat algorithm for continuous optimization problems." Expert Systems with Applications, 69: 159-75.
- Yılmaz S, Küçüksille EU (2015) A new modification approach on bat algorithm for solving optimization problems. Applied Soft Computing, 28, 259-75.
- Prithi S, Sumathi S (2024) A technical research survey on bioinspired intelligent optimization grouping algorithms for finite state automata in intrusion detection system. International Journal of Engineering, Science and Technology, 16: 48-67.
- Ahmmad SNZ, Muchtar F (2020) A review on applications of optimization using bat algorithm.
- Hasançebi OĞUZHAN, Teke TÜRKER, Pekcan ONUR (2013) A bat-inspired algorithm for structural optimization. Computers & Structures, 128: 77-90.
- Jones G, Holderied, MW (2007) Bat echolocation calls: adaptation and convergent evolution. Proceedings of the Royal Society B: Biological Sciences, 274: 905-12.
- Yu H, Zhao N, Wang P, Chen H, Li C (2020) Chaos-enhanced synchronized bat optimizer. Applied Mathematical Modelling, 77: 1201.
- Gandomi, Amir Hossein, Xin-She Yang, Amir Hossein Alavi, Siamak Talatahari (2013) "Bat algorithm for constrained optimization tasks." Neural Computing and Applications, 22: 1239-55.
- Ji, R., Liu, Y., & Zhang, T. (2023). Echolocation-Based Sensor Networks for Prey Detection in Nocturnal Environments. Journal of Computational Intelligence in Engineering, 12(2), 211-224.
- Heim O, Heim DM, Marggraf L, Voigt CC, Zhang X, Luo Y, Zheng J (2020) Variant maps for bat echolocation call identification algorithms. Bioacoustics, 29: 557-71.
- Meng XB, Gao XZ, Liu Y, Zhang H (2015) A novel bat algorithm with habitat selection and Doppler effect in echoes for optimization. Expert Systems with Applications, 42: 6350-64.
- Roeleke M, Schlägel UE, Gallagher C, Pufelski J, Blohm T, Nathan R, Voigt CC (2022) Insectivorous bats form mobile sensory networks to optimize prey localization: The case of the common noctule bat. Proceedings of the National Academy of Sciences, 119: e2203663119.
- Ramírez‐Fráncel LA, García‐Herrera LV, Losada‐Prado S, Reinoso‐Flórez G, Sánchez‐Hernández A, Estrada‐Villegas S, Guevara G (2022) Bats and their vital ecosystem services: a global review. Integrative Zoology, 17: 2-23.
- Prithi S, Sumathi S (2024) A technical research survey on bio-inspired intelligent optimization grouping algorithms for finite state automata in intrusion detection system. International Journal of Engineering, Science and Technology, 16: 48-67.
FIGURE 1
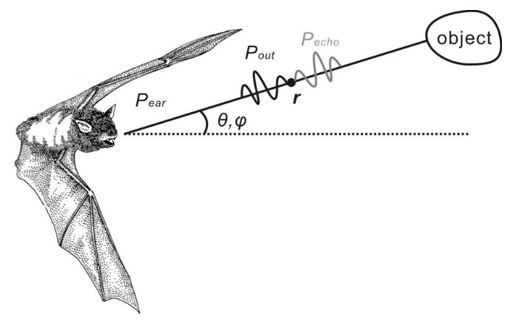
Figure 1: Bat Echo System
FIGURE 2
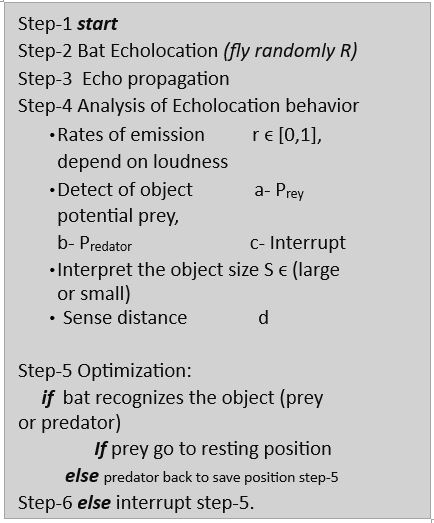
Figure 2
FIGURE 3
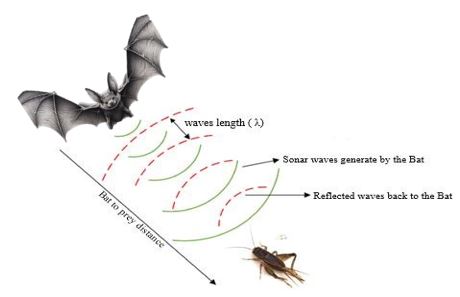
Figure 3: Bat Echo System
FIGURE 4

Figure 4: Noise Interruptions
FIGURE 5

Figure 5: Pray Detection
FIGURE 6
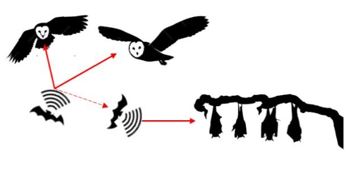
Figure 6: Predator Detection
FIGURE 7
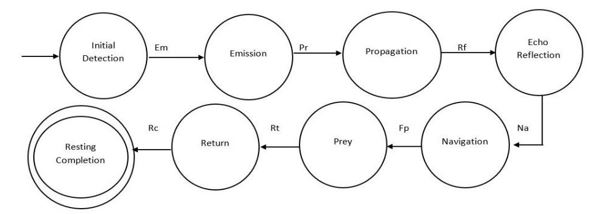
Figure 7: Transition Graph for Noise Interruption
FIGURE 8
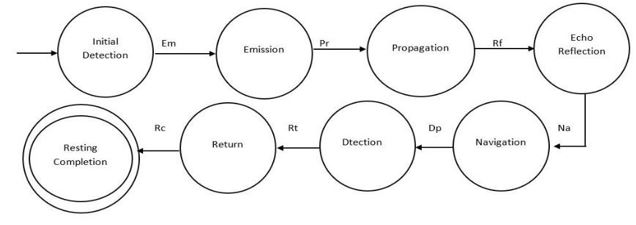
Figure 8: Transition Graph for Detection of Predator
FIGURE 9
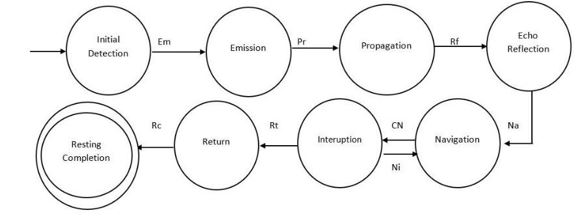
Figure 9: Transition Graph for Noise Interruption
FIGURE 10
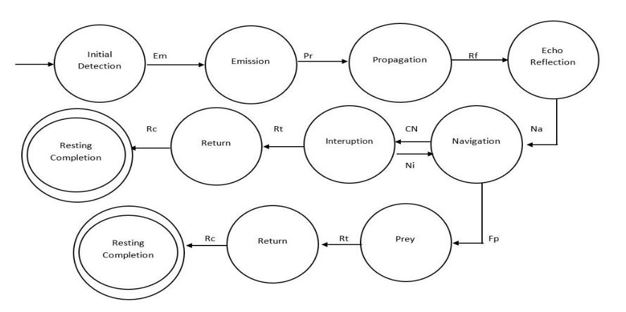
Figure 10: Transition Graph for Interruption with Find Food
FIGURE 11
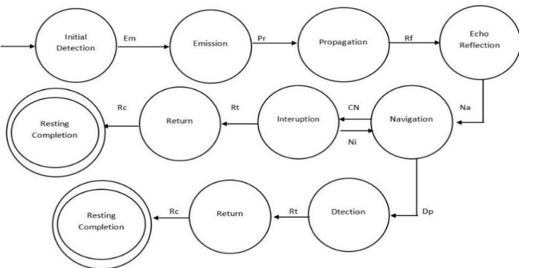
Figure 11: Transition Graph for Interruption with Detection of Predator
FIGURE 12
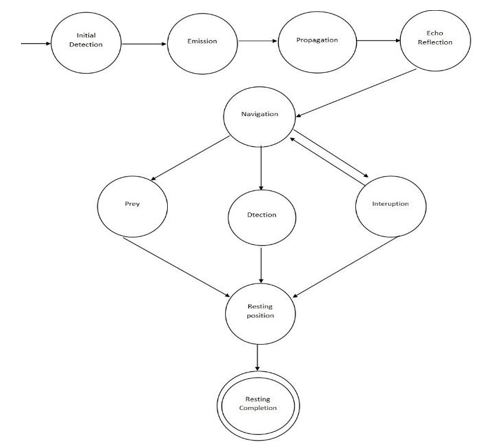
Figure 12: Final Transition Graph
FIGURE 13
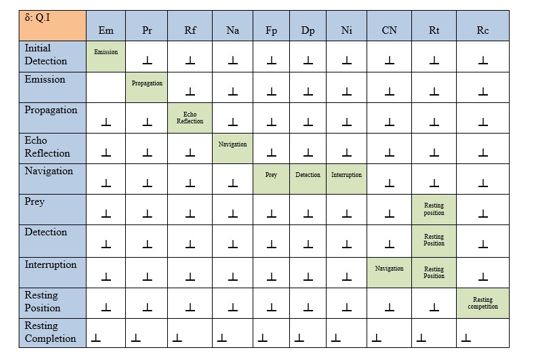
Table 1: Final Table for complete process
FIGURE 14
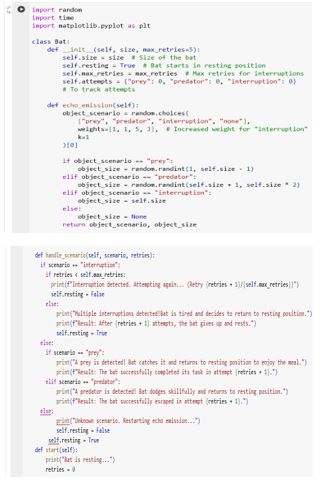
FIGURE 15
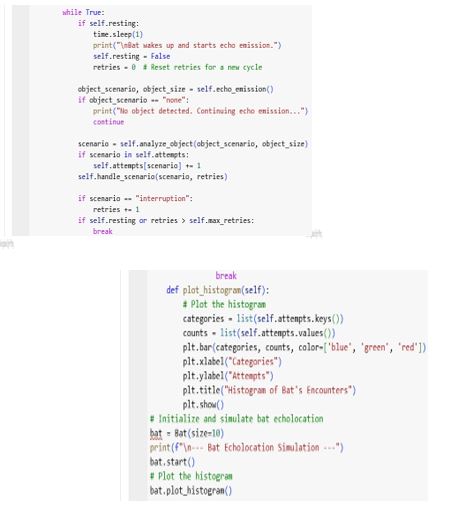
Figure 13
FIGURE 16
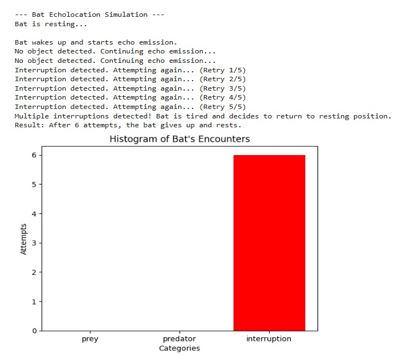
Figure 14
FIGURE 17
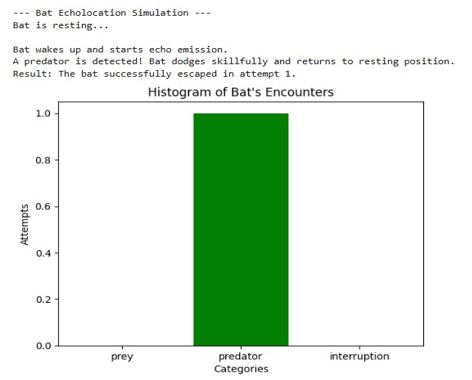
Figure 15
FIGURE 18
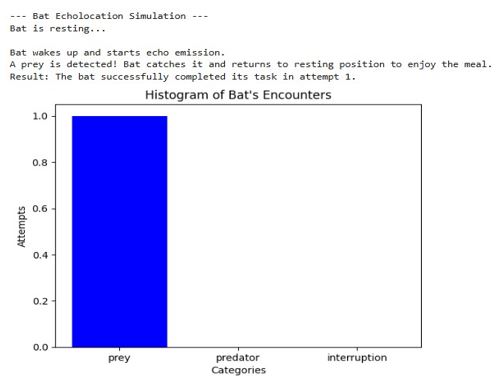
Figure 16
FIGURE 19
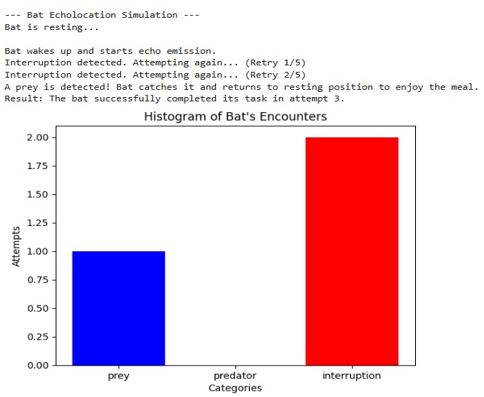
Figure 17
FIGURE 20
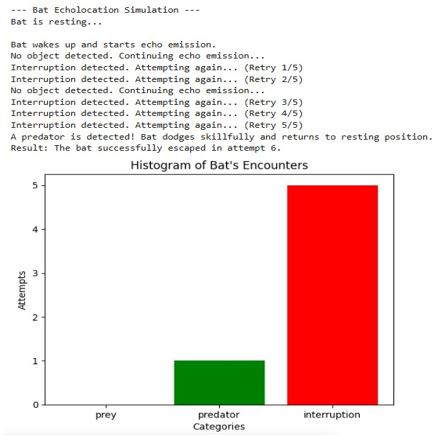
Figure 18
Tables at a glance
Figures at a glance